Es una solución de aplicación de la velocidad basada en Lidar que utiliza inteligencia artificial y visión artificial fusionadas para hacer cumplir la velocidad y el comportamiento del conductor. Nuestra patrulla inteligente P3 utiliza la tecnología Lidar para hacer frente a la importantísima cuestión de detectar, rastrear y seguir vehículos en la carretera para detectar infracciones de tráfico. Nuestra solución utiliza Lidar: fusión de sensor de cámara para garantizar el más alto nivel de precisión, exactitud y confiabilidad.
El informe sobre la situación mundial de la seguridad vial de 2018 revela que las muertes por accidentes de tránsito en todo el mundo han aumentado de 1,25 millones de muertes por año a 1,35 millones de muertes por año desde principios de 2016, con un estimado de 50 millones de personas lesionadas.
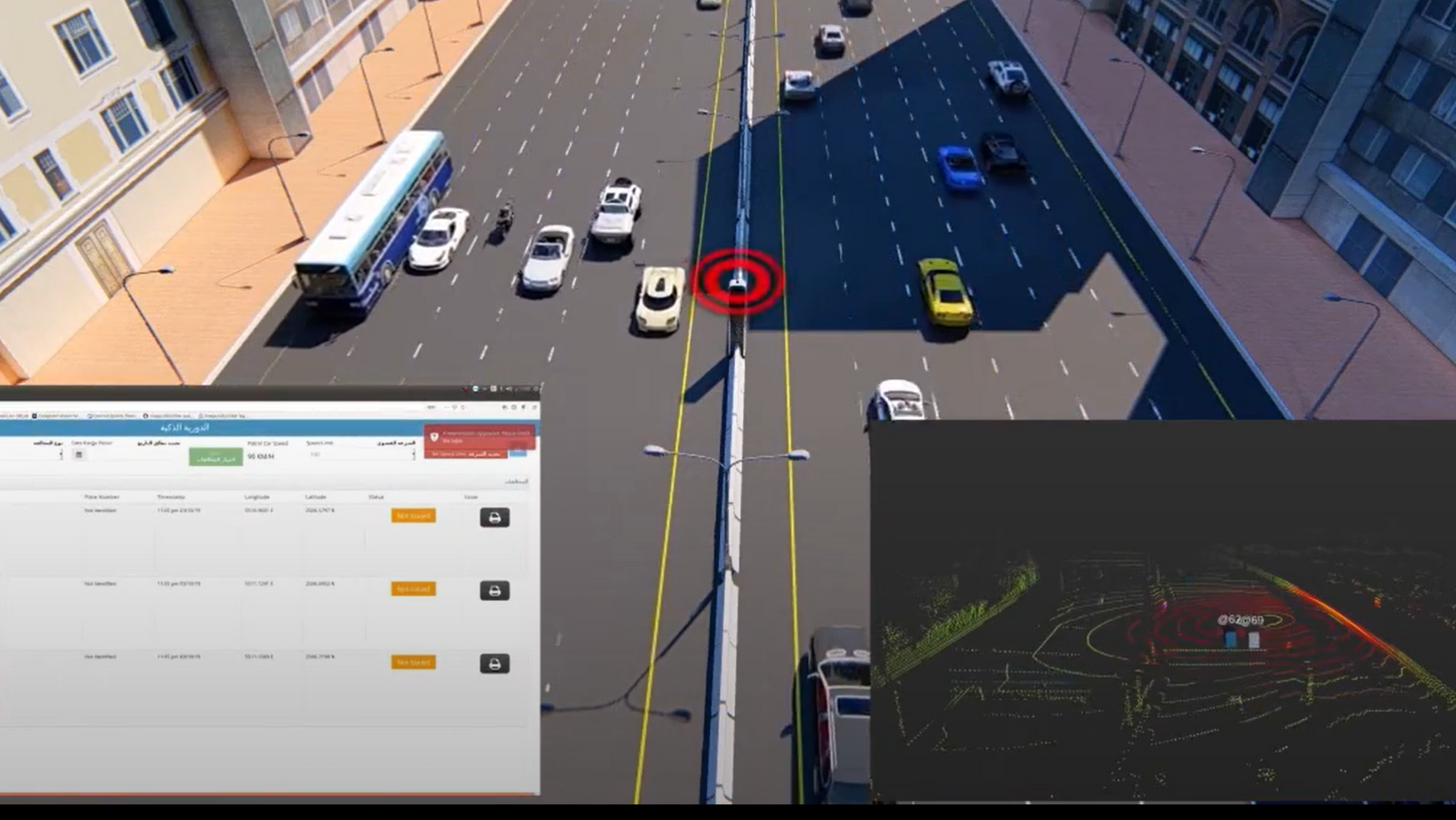
TRC es una unidad estacionaria que tiene como objetivo controlar la seguridad vial y reducir la cantidad de infracciones y, por lo tanto, accidentes. Es un sistema basado en Lidar y cámara que utiliza tecnologías de inteligencia artificial (IA) para medir la velocidad de los vehículos circundantes, todas las infracciones se envían en un tablero acompañado por una imagen clara para el coche con una vista clara de la placa Número.
TRC utiliza tecnologías de inteligencia artificial (IA) para simular la presencia real de un oficial que vigila las calles.
Como funciona ?
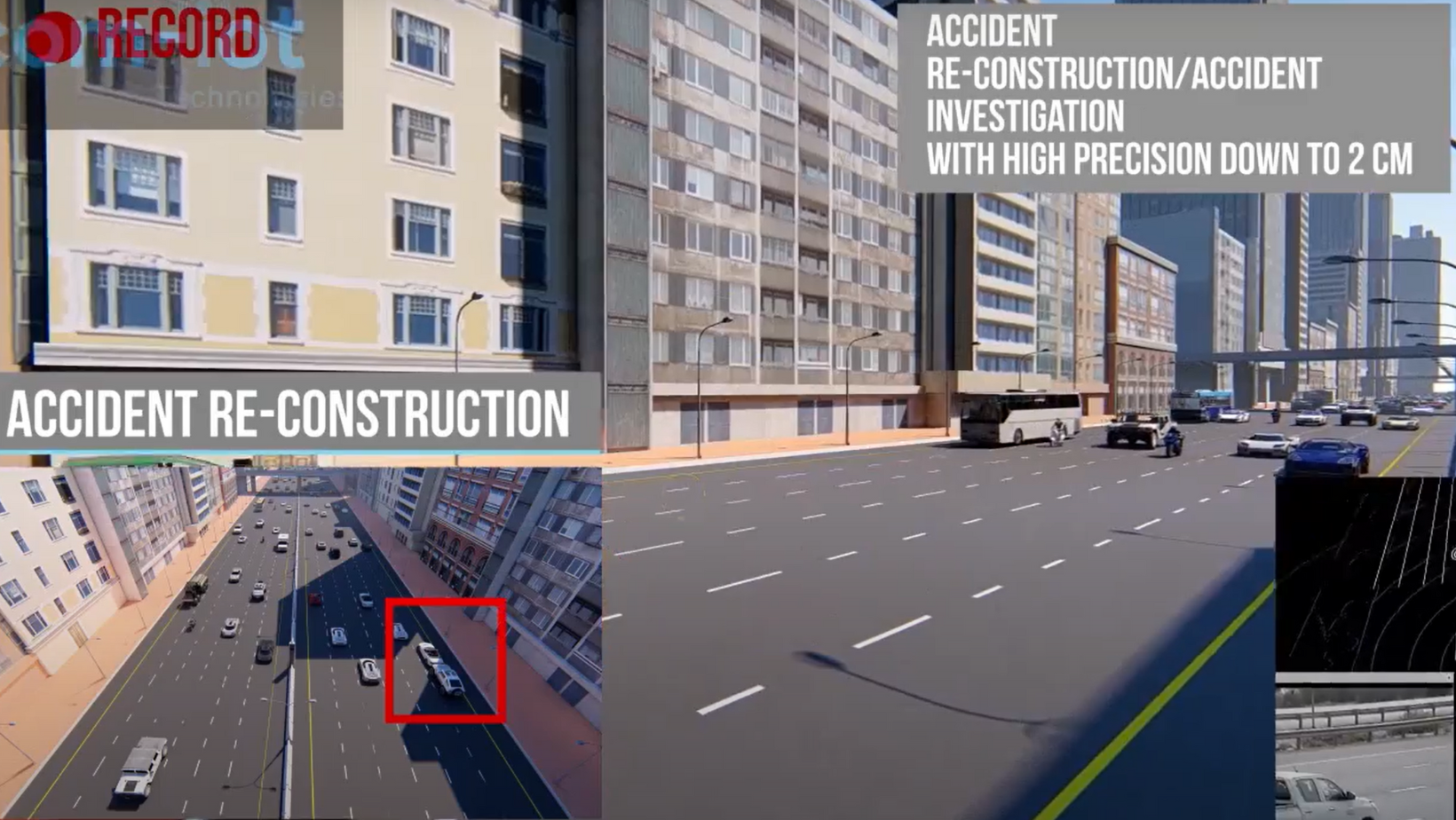
Horus TRC utiliza aprendizaje automático y algoritmos de percepción 3D para escanear el campo de visión del sensor, analizar datos de nubes de puntos y proporcionar información anónima sobre los vehículos detectados.
Detección de conductores distraídos de TRC.
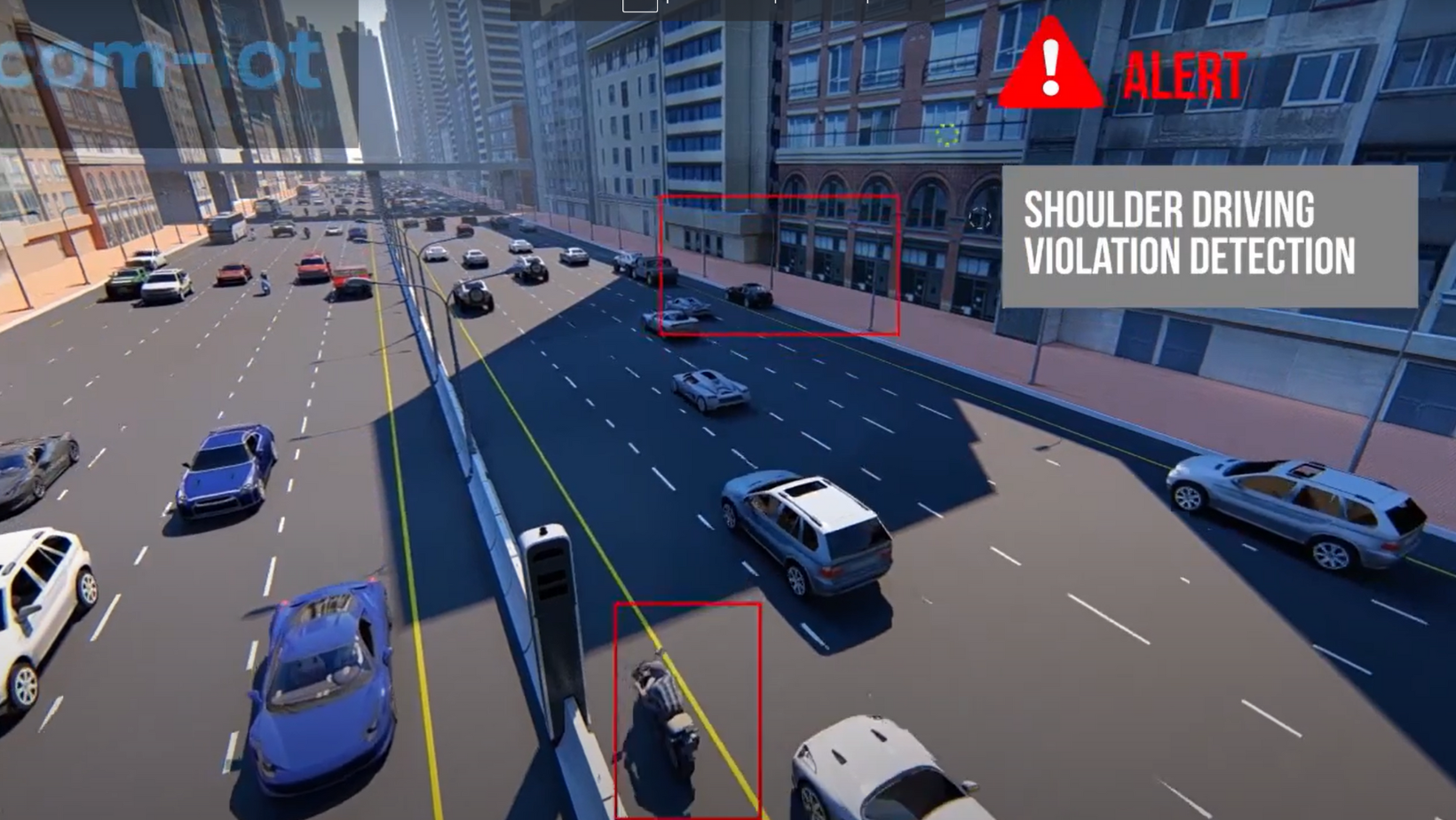
El sistema detecta y rastrea con precisión el comportamiento de los conductores y clasifica una variedad de distracciones, como el uso del teléfono celular y los mensajes de texto, leer texto o simplemente hacer TEA, e inmediatamente lo informa a las autoridades con una foto del vehículo y su número de placa.
DDD usa una cámara de alta resolución para cumplir con sus tareas, la transmisión de la cámara luego se envía a una unidad de procesamiento. Después de que la unidad de procesamiento detecta una infracción, la envía a un servidor central de BIG DATA data que maneja grandes cantidades de datos de muchas unidades, el servidor analiza los datos que se le envían para proporcionar información en tiempo real sobre la seguridad vial.